Biography
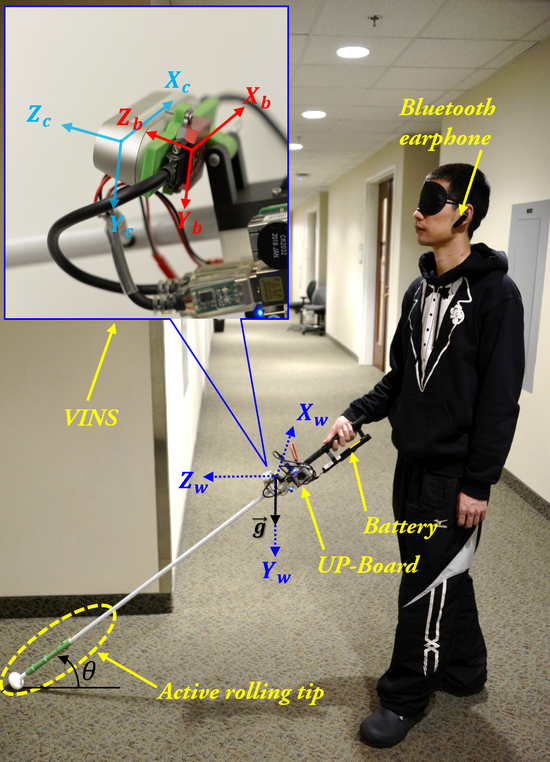
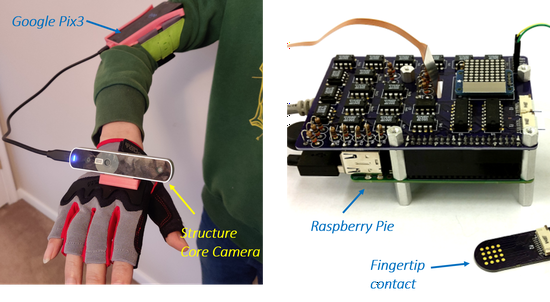
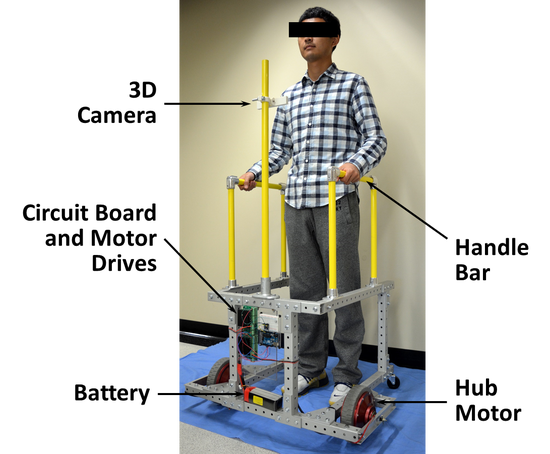
He Zhang is a Postdoctoral Associate at VCU Robotics Lab. His research interests include SLAM, robotics vision, indoor localization, 3D mapping, human pose tracking, and machine learning. He endeavors to build robust intelligent systems to assist blind people for navigation (CRC, W-ROMA) and mobility-impaired patients for rehabilitation (Q-HARP).
Interests
- Simultaneous Localization and Mapping (SLAM)
- Visual-Inertial Odometry (VIO)
- Computer Vision Applications
- Machine Learning
- 3D Mapping & Modeling
- Human Pose Estimation & Gait Analysis
Education
-
Postdoc in Computer Science, 2018-now
Virginia Commonwealth University
-
Ph.D. in Electrical & Computer Engineering, 2014-2018
University of Arkansas at Little Rock
-
Study Certificate of Computer Architecture, 2009-2010
University of Chinese Academy of Sciences
-
B.E. in Computer Science & Technology, 2005-2009
Chinese University of Mining and Technology at Beijing