Q-HARP
 Assistive Robotic Walker Propotype
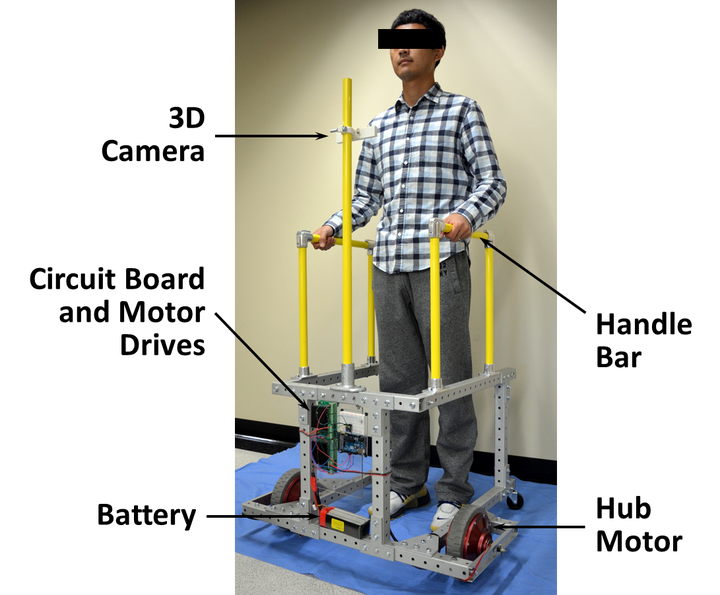
Assistive Robotic Walker Propotype
The proposed project aims at developing a novel quadrupedal human-assistive robotic platform (Q-HARP), with the objective of helping the large number of elderly individuals live a healthy, physically active life style. The Q-HARP primarily functions as a smart power-assist walker: a user, situated in the center of the legged robot, can enjoy the desired amount of power assist in walking according to his/her intent. As such, a Q-HARP user is able to perform an appropriate amount of physical activity, while enjoying the enhanced level of mobility during his/her daily lif. Furthermore, with the Q-HARP’s legged motion, the human-robot system can easily overcome most obstacles in the daily life. With this capability, the Q-HARP has a potential of becoming a basic building block for Aging-in-Place, enabling elderly individuals to stay in their home longer without conducting costly modification to their existing home structures.
He Zhang (David)
Postdoc in Computer Science
My research interests include Robotics Vision, SLAM, VIO, Machine Learning, 3D Mapping, Human Pose Estimation.