RGB-D Camera Based Walking Pattern Recognition by Support Vector Machines for a Smart Rollator
Abstract
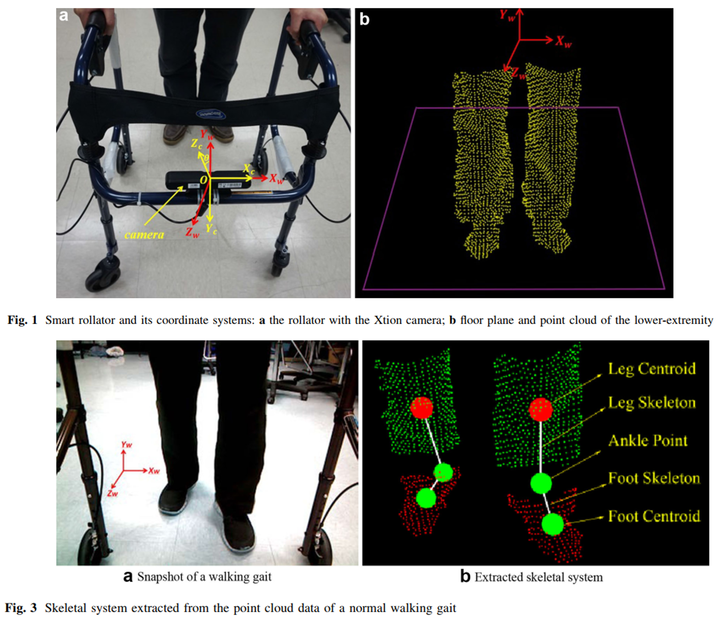
This paper presents a walking pattern detection method for a smart rollator. The method detects the rollator user’s lower extremities from the depth data of an RGB-D camera. It then segments the 3D point data of the lower extremities into the leg and foot data points, from which a skeletal system with 6 skeletal points and 4 rods is extracted and used to represent a walking gait. A gait feature, comprising the parameters of the gait shape and gait motion, is then constructed to describe a walking state. K-means clustering is employed to cluster all gait features obtained from a number of walking videos into 6 key gait features. Using these key gait features, a walking video sequence is modeled as a Markov chain. The stationary distribution of the Markov chain represents the walking pattern. Three Support Vector Machines (SVMs) are trained for walking pattern detection. Each SVM detects one of the three walking patterns. Experimental results demonstrate that the proposed method has a better performance in detecting walking patterns than seven existing methods.